近日我院纺织结构材料交叉技术研究室孙丰鑫研究团队联合德累斯顿工业大学、劳伦森大学及上海国际时尚教育中心的研究人员,设计了一种新型柔性可编程纺织品超表面。这种材料可用于开发具备类似变形与伪装能力的机器人,相关研究成果以题为“Structurally Programmed Textile Metasurfaces for Soft Morphing Robotics and Bionic Mimetic Camouflage”发表于Advanced Fiber Materials。其核心是通过调整交织纱线线圈的几何排列,实现针织结构的精准工程化设计。研究人员提出一种基于结构驱动的设计框架:通过在编织外壳中引入空间局域的应变约束,仅凭针脚几何的调控,即可赋予软体机器人系统与仿生伪装所需的形态变化能力。结合改进的超弹性力学理论分析,将织物宏观力学行为解耦为针脚拓扑与纱线组成的独立作用,并通过几何调控实现了可编程的力学响应。

图1. 仿生伪装用局部应变约束纺织品的灵感与概念
目前多数软体机器人依赖橡胶类弹性材料,通过模具和复杂加工实现特定的弯曲或收缩功能。这种方式不仅成本高、效率低,还在多场景适应上表现不佳。而研究团队发现:通过“针脚编程”即可赋予织物不同的弹性与形变模式,仅靠结构设计,无需更换材料,就能精准控制机器人的“变身”过程。这一“几何编程” 策略使得编织外壳细观拓扑能够实现多样化的非欧几里得形态变换,包括:多模式充气变形、单一刺激下的序列化运动,以及预设的平面到立体高斯曲率转变,用于动态仿生伪装。
研究提出的几何驱动的设计思路,为低成本、可扩展、定制化应用打开了大门,如个性化可穿戴设备、自适应伪装外壳、野生动物观测设备、抗环境干扰的人机交互,甚至用于体温调节的智能城市服装等多功能应用中展现出广阔前景。
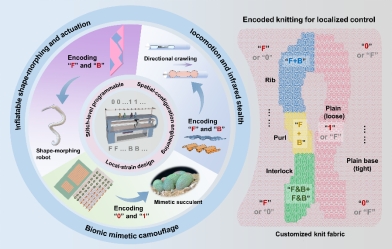
图2. 几何驱动的可编程纺织品超表面及其软体机器应用
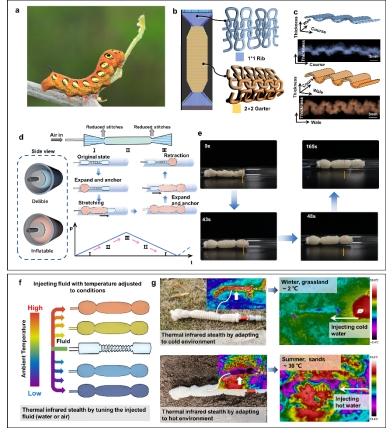
图3. 结构异构针织结构开发爬行运动与红外伪装功能的软体机器人。a 皮肤有褶皱的毛虫照片。b 仿生软体爬行机器人的针织编码设计图与结构模型。c 罗纹线圈横向(上)与双反面线圈纵向(下)的波纹截面图。d 软体机器人的设计原理与运动方式。e 单压力源驱动的软体机器人连续爬行过程快照。f 流体循环实现红外伪装的原理示意图。g 通过向机器人注入低温和常温流体实现红外伪装
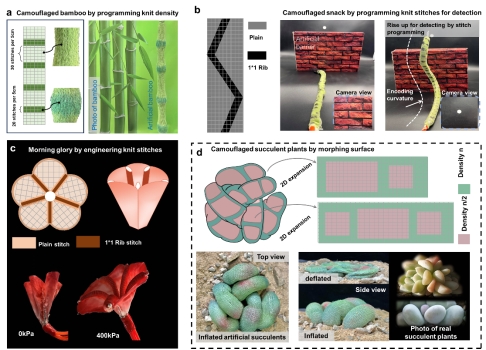
图4.结构异构软体针织机器仿生的竹子、蛇与多肉植物
原文链接:https://doi.org/10.1007/s42765-025-00591-0
Structurally Programmed Textile Metasurfaces for Soft Morphing Robotics and Bionic Mimetic Camouflage, Advanced Fiber Materials (2025).



